本文來源於:施家邦 工控邦
Q1.LXM26/28係列伺服支(zhī)持哪些控製(zhì)方式?
LXM26係列伺服支(zhī)持PTI控製,Modbus控(kòng)製,模擬量控製,以及端子控製(zhì)。
LXM28係列伺服在LXM26係(xì)列(liè)伺服的基礎上增加了CANopen,Ethercat以及Sercos控製,LXM28E和S係列伺服不支持PTI控製(zhì),模擬量和端子控製。
Q2.LXM26/28係(xì)列伺服支持哪些運行模式?
LXM26係(xì)列伺服支持脈衝模式PT,內(nèi)部任務模(mó)式PS,速度模式V,轉矩模式(shì)T,內部速度(dù)模式VZ,內部轉矩模式TZ以及雙模式切換
LXM28A係列伺(sì)服除支持上述運行模式外,還支持CANopen運行模(mó)式,其中CANopen運行模式包含以下子模式:
·Profile Position
·Profile Velocity
·Profile Torque
·Homing
·Interpolated Position
·Cyclic Synchronous Position
·Jog
·Electronic Gear
·Analog Velocity
·Analog Torque
LXM28E係列伺服隻支持Ethercat運行模式(shì),其中包含以下子模式:
·Jog
·Profile Position
·Profile Velocity
·Profile Torque
·Profile Homing
·Interpolation
·Cyclic Synchronous Position
·Cyclic Synchronous Velocity
·Cyclic Synchronous Torque
LXM28S係列伺服隻支持Sercos3運行模式,其中包含以下子模式:
·Profile Homing
·Cyclic Synchronous Position
·Cyclic Synchronous Velocity
·Cyclic Synchronous Torque
Q3.LXM26/28係列(liè)伺服出(chū)現零點漂移如何處理?
我們在使用模擬量或脈衝控製LXM26/28係列伺服時,有時候會發現使能之後,未給任何命令,伺服(fú)會緩慢運動,此現象稱為零點漂移(yí),處理零點漂移有兩種方法:
1. PT模式時,將脈衝(chōng)方式從脈衝/方向(xiàng)改為CW/CCW模式
2.設置零漂抑製,設定P1-38參數略大於緩慢運行的速度(P1-38單位為RPM),在DI1-DI8中找一個未使用的點(diǎn),將其設置(zhì)為5(ZCLAMP),重(chóng)啟(qǐ)之後即可抑製零漂。
Q4.LXM26/28係列伺服電子齒輪比如何計算?
LXM26/LXM28A係列伺服(fú)PT模式電子齒輪比設置參數為P1-44和P1-45,計算方法為(1280000/P1-44)*P1-45,以默認參數為例,1280000/128*10=100000,表示PLC給100000個脈衝伺服運(yùn)行一圈,速度為1轉每秒,即60RPM。
LXM28A,LXM28E係列伺服(fú)使用通訊(xùn)模式控(kòng)製時無法通過麵板修改電子齒輪比,必須(xū)通過通訊配置修改CANopen索引6091和6092的值來修改(LXM28E的Ehercat是基於CANopen協議,所以也可以(yǐ)參考CANopen索引(yǐn)地址),具體算法如(rú)下:
分辨率 = (6092:1h / 6092:2h) x (6091:1h / 6091:2h)
|
單位(wèi)尺寸 |
示例 |
|
位(wèi)置單位 |
假設: ·6091:1h = 360 ·6091:2h = 1 ·6092:1h = 1 ·6092:2h = 1 實際位置讀數 = 720 則: 720/[(360/1)x(1/1)]=2轉 |
|
速度單位 |
假設: ·6091:1h=360 ·6091:2h=1 ·6092:1h=1 ·6092:2h=1 實際位置讀(dú)數(shù)=720 則: 720/[(360/1)x(1/1)]=2轉/秒 |
|
加速度單位 |
假設: ·6091:1h=360 ·6091:2h=1 ·6092:1h=1 ·6092:2h=1 實際位置讀數(shù)=720 則: 720/[(360/1)x(1/1)]=2轉/秒2 |
Q5.TM241使(shǐ)用PT模式控製LXM26/28伺服支持哪些回零方(fāng)式(shì)?
伺服驅動器(qì)在PT模(mó)式下,回零模(mó)式取決於PLC,伺服作為執行元件(jiàn)執行PLC發出(chū)的回零邏輯(jí),以TM241為例,支持以下回(huí)零模式:
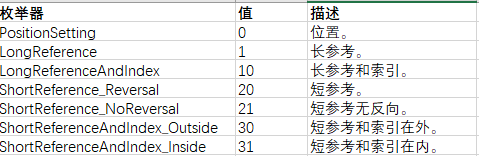
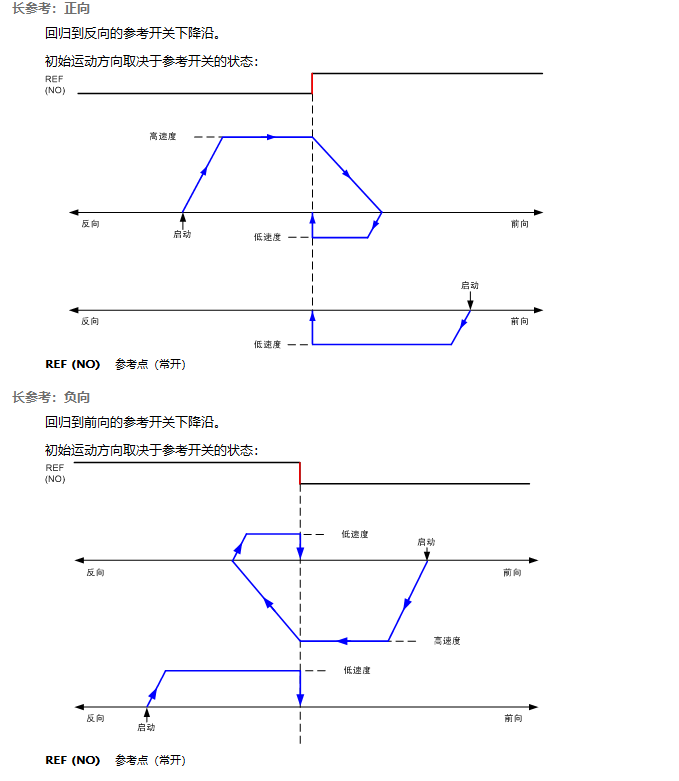
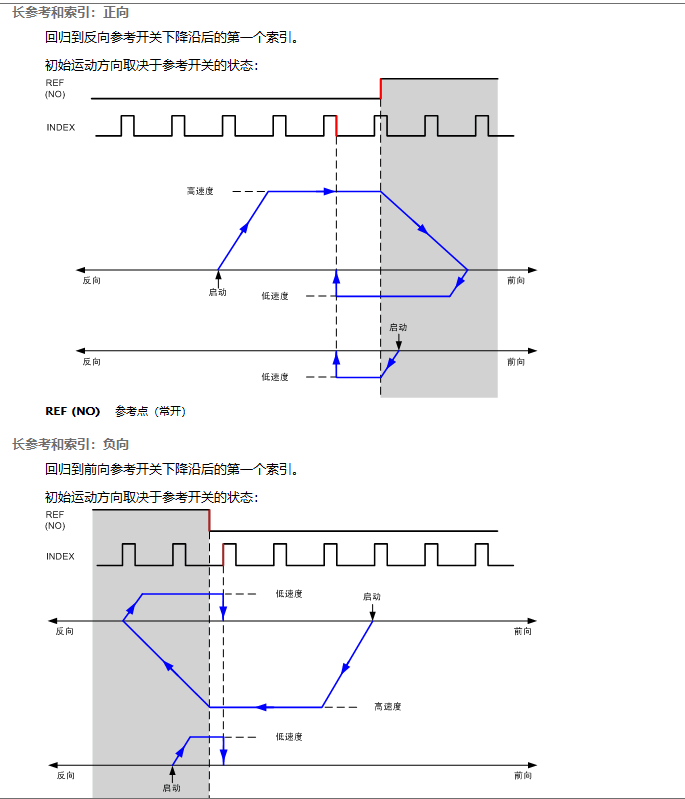
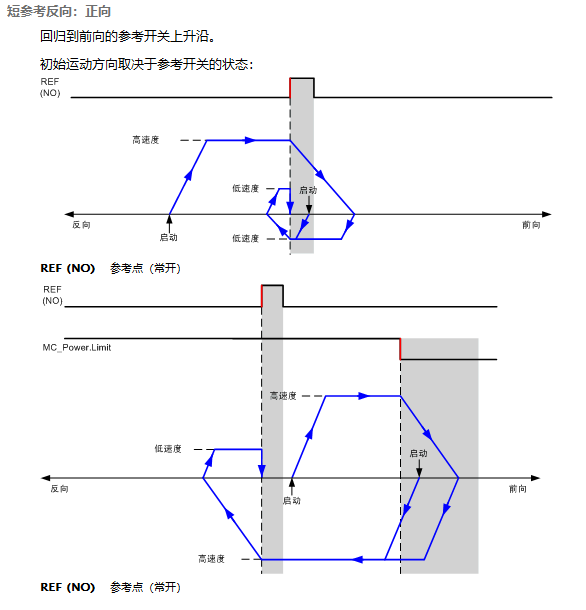
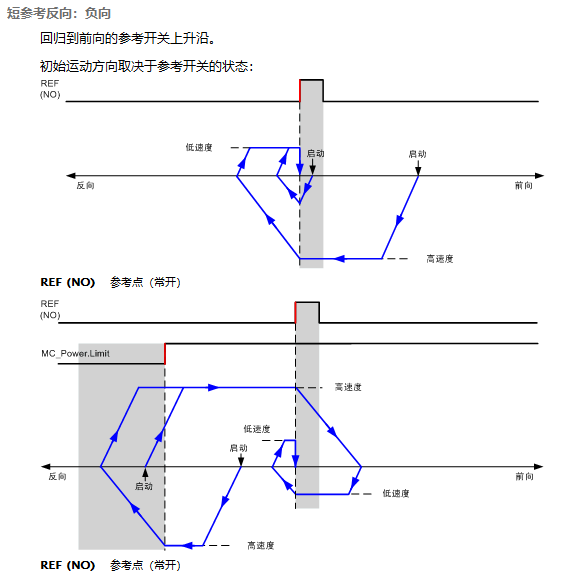
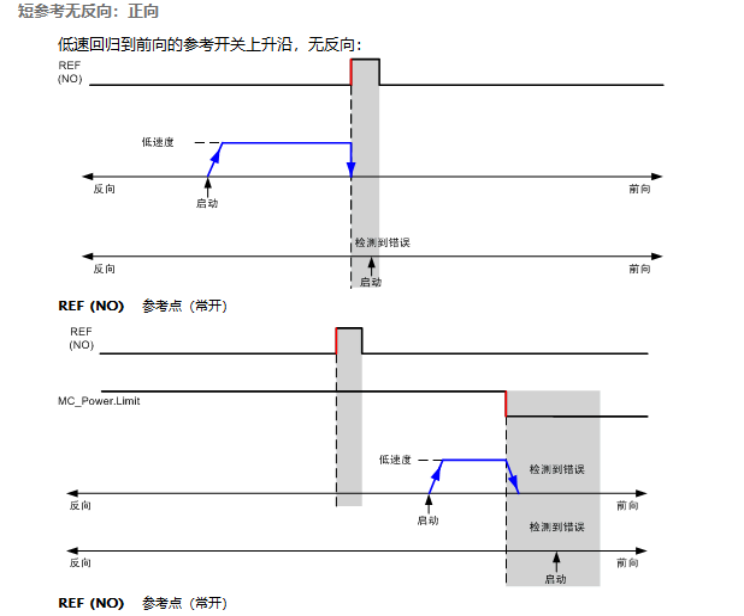
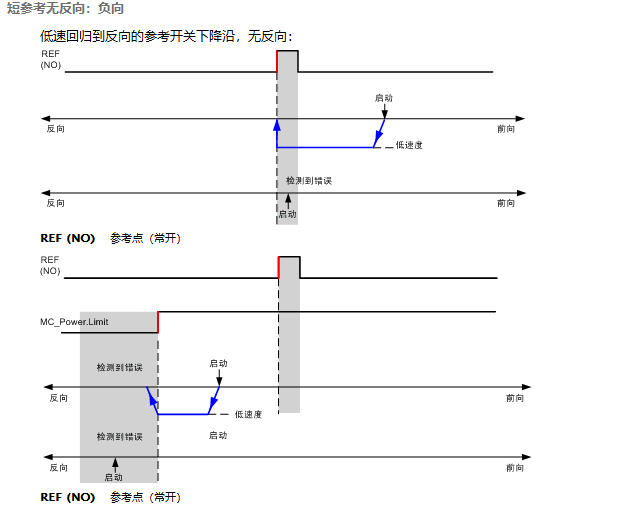
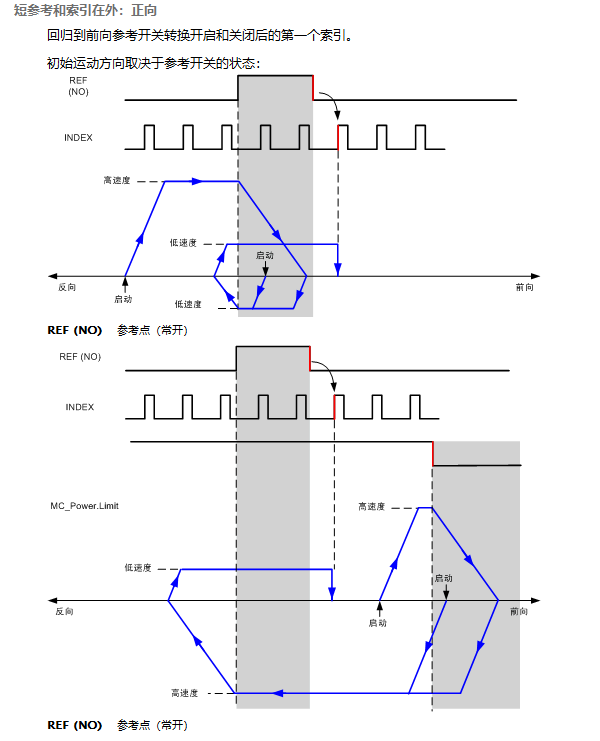
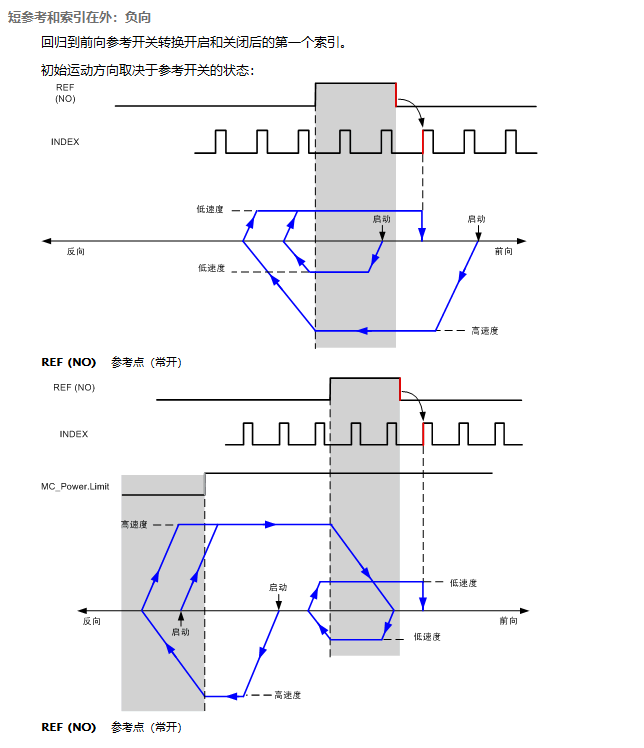
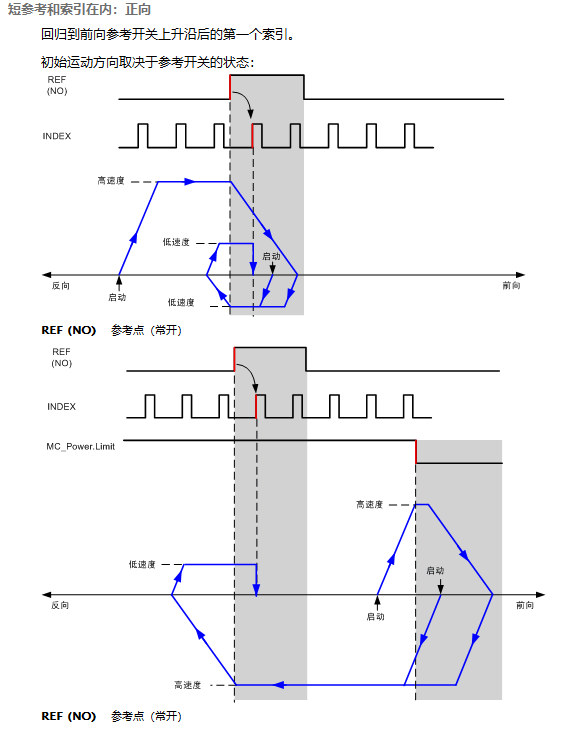
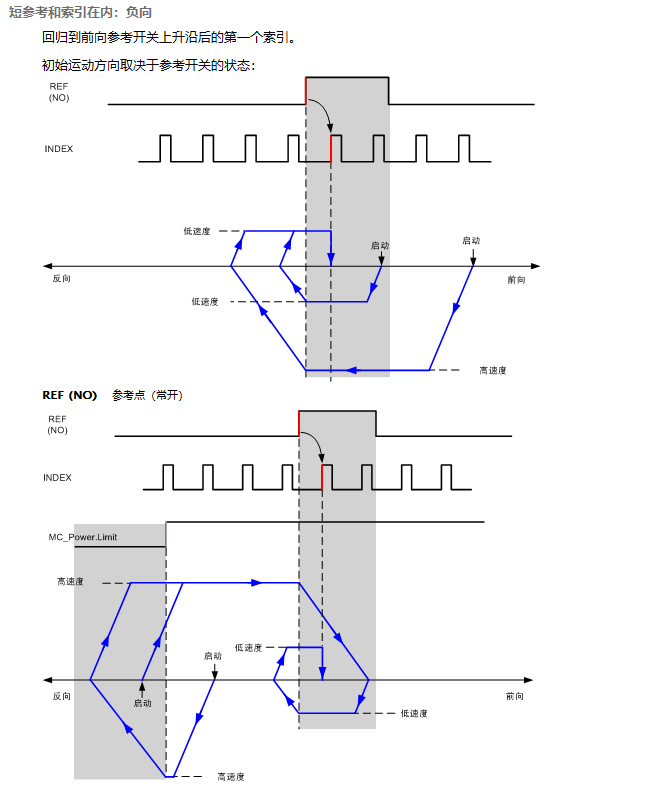
具體回零時序邏輯如下:
0:位置——在位置設置情況下,當前位(wèi)置設置為指定的位置值。不(bú)執行任何移動。
1:長參考
10:長參考和索引
20:短參考反向
21:短參考無反(fǎn)向
30:短參考和索引在外
31:短參考和索引在內
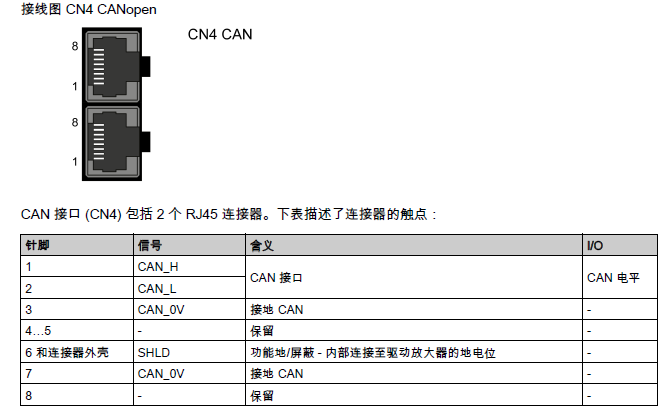
Q6.LXM28A係列(liè)伺服的CANopen接口引腳如何定義?
LXM28A伺服CAN接口(CN4)包括2個RJ45連接器。下表描述了連接(jiē)器的觸點:
Q7.LXM26/28係列伺服如何自整(zhěng)定?
LXM26/28係列伺服可以使用麵板或SoMove軟(ruǎn)件進行自整定,可以支持輕(qīng)鬆自整定,舒適自(zì)整定和手動整定參(cān)數(shù)
·輕鬆整定:無需(xū)使(shǐ)用者參與的自(zì)動整定。在(zài)大多數的應用場合,輕鬆調整都可以提供良好的和動(dòng)態的結果。
·舒適整定:自動整定在用戶的支持下執行。您(nín)可以選擇優(yōu)化標準並設置運動(dòng)、方向和速度的參數。
·手動整定:在手動整(zhěng)定時(shí)可以(yǐ)執行測試運動,並通過(guò)示波器功能來優化控製環。
需要注(zhù)意,目前1.75以上版(bǎn)本,當P8-35=0X4001時,無法使用(yòng)自整(zhěng)定,隻有當P8-35=0X207時才能使用自整定,通常使用輕(qīng)鬆自整定即可完成絕大部分應用,具體麵板(bǎn)操作(zuò)如下:
將參數P2-32設為1,以執行輕鬆整定。
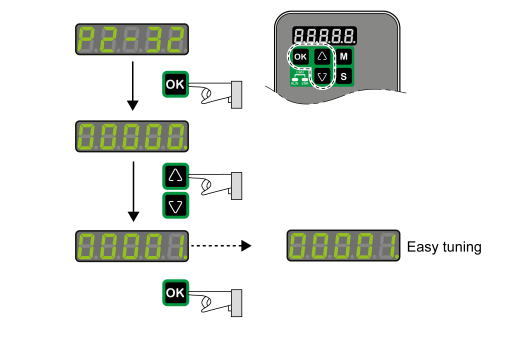
在您通過(guò)P2-32開啟輕鬆整定之後,進度會(huì)以tn000到(dào)tn100的百(bǎi)分比顯示在HMI顯示器(qì)上。
按HMI上的M鍵可中斷自動調整(zhěng)。
自動調整成功完成後會在HMI顯(xiǎn)示器上顯示done。
按HMI上的OK鍵(jiàn)可儲存控製電路參數的值。HMI顯示器會顯示saved。
按HMI上的M鍵可摒棄自動調整的結果。
如果自動調整未能成功(gōng)運(yùn)行,HMI顯示(shì)器上會顯示ERROR。通過參數P9-30可確定原因。
參數P9-37提供在自動調整中最後一次出現的事件的更多信息。
需要注意,輕(qīng)鬆(sōng)整定需要(yào)總共5圈的運動範圍,在輕鬆(sōng)整(zhěng)定時,將從當前電機位置朝正方向轉動2.5圈並朝(cháo)負方向轉動2.5圈。若相(xiàng)應的運動範圍不可用,則應使用舒適整定。
Q8.LXM26/28係列(liè)伺服使用SoMove聯(lián)機需要注意什(shí)麽(me)?
硬件:
聯機電纜。型號為TCSMCNAM3M002P,此電纜一端為RJ45水晶頭,用於連接伺服端的CN3端口,一端為A型USB接頭,用於連接電腦。
軟件:
SoMove軟件:
https://www.se.com/ww/en/download/document/SoMove_FDT/
LXM26/28DTM:
https://www.se.com/ww/en/download/document/LXM28ADTMLbrary/
Q9.LXM26/28係列伺服如何設定上電使能?
LXM26/28上電使能用兩種方法:
1. 設定P2-30=1,此時伺(sì)服立即使能,無需重新上電,但斷電再上(shàng)電後使能信(xìn)號(hào)丟失,且P2-30恢複為0,需要重新設定。
2. 設定P2-10=1,P2-68=1,斷電再上電(diàn)後伺服自(zì)動處於使能狀態。
Q10.LXM26/28係列伺服如何(hé)修改運行(háng)方向?
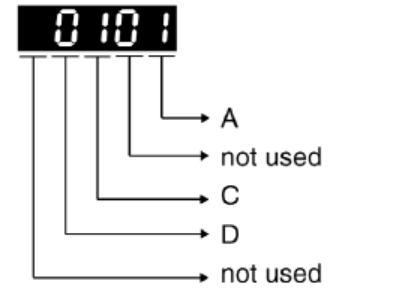
如果在運行時(shí)發現伺服電機方向和(hé)實際方向相反,可(kě)以修改伺服(fú)P1-01參數的C位來修改(gǎi)運行方向
運動方向定(dìng)義:看向突出的(de)電機(jī)軸的末端時,如(rú)果電機(jī)軸逆(nì)時針方向旋轉,則為正運動方向。
出廠設置時(shí)的(de)運(yùn)動(dòng)方向:

服務熱線:0371-60298207 13383812899
公司傳真:0371-60298207
公司郵箱:nhauto@xflyy.com
公司地址:河南省新鄭市薛店鎮中德產業園47-4號樓
技(jì)術支持:鄭州網站製作 豫ICP備2020034884號-1
 官方微信公眾號
官方微信公眾號